Calcule la première dérivée.
Syntaxe
Derivative(Signal [ , le Mode Variable DERIVATIVE_CENTRAL_3_POINTS ])
ou
Derivative(Amplitude, le Time [ , le Mode Variable DERIVATIVE_CENTRAL_3_POINTS ])
La syntaxe de la fonction Derivative se compose des éléments suivants :
Section |
Description |
||||||
|---|---|---|---|---|---|---|---|
Signal |
Le signal dont la dérivée première est calculée. Si l'argument est une série de données ou une matrice de données, 1 est utilisé comme l'incrément dX pour la dérivée. Les structures de données autorisées sont Série de données, le Matrice de données, le Signal, le Série de signaux et Série de signaux avec composante X bidimensionnelle. Tous les types de données numériques sont autorisés. Si l'argument est une liste, alors la fonction est exécutée pour chaque élément de la liste et le résultat est également une liste. |
||||||
Amplitude |
Renvoie la composante Y du signal à traiter. Si vous spécifiez un signal, alors sa composante Y est utilisée. Les structures de données autorisées sont Série de données, le Matrice de données, le Signal, le Série de signaux et Série de signaux avec composante X bidimensionnelle. Tous les types de données numériques sont autorisés. Si l'argument est une liste, alors son premier élément est pris. S'il s'agit à nouveau d'une liste, le processus est répété. |
||||||
Time |
Renvoie la composante X du signal à traiter. Si vous spécifiez un signal, alors sa composante Y est utilisée. Les structures de données autorisées sont Série de données, le Matrice de données, le Signal, le Série de signaux et Série de signaux avec composante X bidimensionnelle. Tous les types de données numériques sont autorisés. Pour les types de données complexes, un nombre est formé. Si l'argument est une liste, alors son premier élément est pris. S'il s'agit à nouveau d'une liste, le processus est répété. |
||||||
Mode |
Pour l'approximation discrète de la dérivée, on utilise des différences finies sous forme de quotients de différences centrales. L'ordre des différences finies utilisées détermine la précision du calcul numérique de la dérivée. L'argument Mode peut avoir les valeurs suivantes :
Si l'argument est une liste, alors son premier élément est pris. S'il s'agit à nouveau d'une liste, le processus est répété. Si l'argument n'est pas spécifié, il est défini à la valeur par défaut DERIVATIVE_CENTRAL_3_POINTS . |
Remarques
Le résultat est toujours du type de données Virgule flottante de 64 bits.
L'unité de résultat est égale au quotient des unités de Amplitude et Time ou des composantes Y et X de Signal. Pour les matrices de données et les séries de signaux, le calcul s'effectue colonne par colonne. Les valeurs sont converties en valeurs à virgule flottante de 64 bits avant le calcul. Les composantes X ou Z, si elles sont présentes, sont reprises telles quelles dans le résultat.La dérivée numérique est calculée en mode DERIVATIVE_CENTRAL_3_POINTS pour les ensembles de données échantillonnés de manière équidistante (pas dX), à l'aide du quotient de différence centrale suivant (en supposant qu'il y ait au moins trois points de données) :
![]()
Cela correspond à la moyenne des quotients de différence entre le côté gauche et le côté droit (unilatéral), c'est-à-dire :
![]()
En mode DERIVATIVE_CENTRAL_5_POINTS la dérivée numérique est calculée pour les ensembles de données échantillonnés de manière équidistante à l'aide du quotient de différence central suivant (en supposant qu'il y ait au moins cinq points de données) :
![]()
Pour les deux variantes, il n'y a pas assez de points d'appui disponibles sur les bords pour le calcul des différences centrales. La dérivée numérique y est donc calculée à l'aide de quotients différentiels de Finiter non centraux, qui ont le même ordre. Les algorithmes aux bords sont spécifiés dans [1].
Les règles de calcul de la dérivée numérique indiquées peuvent également être généralisées pour les ensembles de données échantillonnés de manière non équidistante, voir [1]. Ces règles de calcul sont également implémentées dans FlexPro et sont utilisées automatiquement dès que le jeu de données de base possède un échantillonnage non équidistant.
Remarque En général, plus l'ordre est élevé dans le choix des différences finies, plus la précision de la détermination de la dérivée est grande pour les ensembles de données lisses (non bruyantes). Si, en revanche, les ensembles de données sont bruyants, l'erreur numérique dans la détermination de la dérivée est accrue, si un ordre supérieur est utilisé dans le choix des différences finies. Le choix du mode de dérivation doit donc également dépendre du bruit / de la régularité de l'ensemble de données sous-jacentes . Le mode DERIVATIVE_CENTRAL_5_POINTS est par exemple prescrit pour les évaluations de crash, voir les directives J1727 de [2] et ECE-R94 de [3].
En revanche, si l'on s'intéresse au spectre des fréquences, il est utile de considérer les règles de dérivation comme des filtres numériques (voir aussi [4]). Les règles de dérivation possèdent ici la courbe d'amplitude suivante. Le différentiateur idéal (courbe de filtrage de la différentiation continue) est également enregistré, ainsi que la différentiation vers l'avant et vers l'arrière au moyen de la fonction Diff-Fonction :
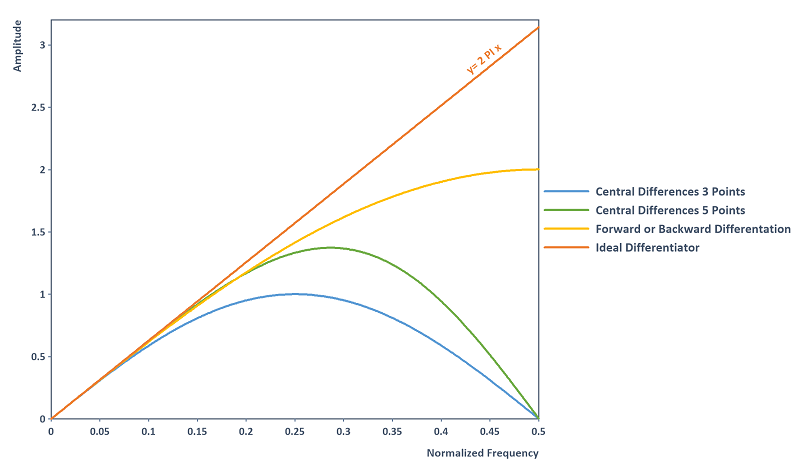
Observation : la règle centrale à 3 points ainsi que la règle centrale à 5 points suppriment le bruit à haute fréquence dans le domaine de la limite de Nyquist 0,5. La règle centrale à 5 points possède une approximation de la réponse en amplitude du différentiateur idéal plus précise que la règle centrale à 3 points dans toute la gamme de fréquences. Les quotients différentiels unilatéraux vers l'avant et vers l'arrière possèdent certes une approximation plus précise de la réponse en amplitude du différentiateur idéal, mais ils amplifient ainsi le bruit à haute fréquence. Il convient de noter que les règles centrales de différence ont une réponse de phase constante de 90 degrés et correspondent donc exactement à la réponse de phase du différentiateur idéal. D'autre part, les quotients de différence en avant et en arrière ont un déphasage linéaire.
Disponible dans
FlexPro View, Basic, Professional, Developer Suite
Exemples
Derivative(Signal)
Calcule la dérivée discrète d'un signal arbitraire à l'aide de la règle centrale des 3 points.
Derivative({1.0, 3.0, 5.0, 5.0, 4.0, 3.0})
Calcule la dérivée {2, 2, 1, -0.5, -1, -1} de la série de données donnée en argument, en prenant 1.0 comme incrément dX. Le résultat possède la même longueur d'enregistrement que l'enregistrement d'entrée.
Diff({1.0, 3.0, 5.0, 5.0, 4.0, 3.0}, DIFF_QUOTIENT_FORWARD)
Calcule les quotients de différence de valeurs voisines à l'aide de la fonction Diff-Et donne {2, 2, 0, -1, -1} comme résultat. La Diff-Fonction utilise donc des différences non centrales-finies (du premier ordre). La longueur de l'enregistrement du résultat est réduite de un par rapport à l'enregistrement d'entrée.
Dim x = Series(-6, 6, 0.5)
Derivative(Signal(2.2 + 6.1*x + 3.6*x^2 + 12*x^3 - x^4, x), DERIVATIVE_CENTRAL_5_POINTS)
Calcule la dérivée d'un polynôme du quatrième degré aux points d'échantillonnage x. Le résultat coïncide avec la dérivée exacte Signal(6.1 + 7.2*x + 36*x^2 - 4*x^3, x).
Dim x = Series(-3, 3, 0.1)
Dim f = Signal(Sin(x^2), x)
Dim derivExact = Signal(2*x*Cos(x^2), x)[[ 1.0 ]]
Absolute(Derivative(f, DERIVATIVE_CENTRAL_3_POINTS)[[ 1.0 ]] - derivExact)
Détermine pour le mode DERIVATIVE_CENTRAL_3_POINTS l'erreur de calcul de la dérivée numérique de la fonction lisse f = Sin(x2) à la position 1.0. L'erreur est proportionnelle à 0.01. Si l'on choisit au contraire DERIVATIVE_CENTRAL_5_POINTS on obtient une plus grande précision avec une erreur proportionnelle à 0.0001. Si l'on utilise plutôt la fonction Diff-La dérivée est calculée avec une erreur proportionnelle à 0,1 (précision la plus faible). Pour l'approximation de la dérivée, il faut donc en général utiliser la Derivative-Fonction de la Diff-Fonction doit être préférée.
Voir aussi
Fonction SavitzkyGolayDerivative
Objet d'analyse Analyse du signal
Littérature
[1] Bengt Fornberg: Generation of Finite Difference Formulas on Arbitrarily Spaced Grids. Dans: Mathematics of Computation, Vol. 51, No. 184, Pages 699-706. https://doi.org/10.1090/S0025-5718-1988-0935077-0, le 1988.
[2] Safety Test Instrumentation Stds Comm: Calculation Guidelines for Impact Testing (J1727). Dans: SAE International. http://standards.sae.org/j1727_201502/, le 2015.
[3] UN Vehicle Regulations: Regulation No. 94 - Frontal collision protection (ECE-R94). Dans: Concerning the Adoption of Uniform Technical Prescriptions for Wheeled Vehicles, Equipment and Parts which can be Fitted and/or be Used on Wheeled Vehicles and the Conditions for Reciprocal Recognition of Approvals Granted on the Basis of these Prescriptions. http://www.unece.org/trans/main/wp29/wp29regs81-100.html, le 2013.
[4] Tilman Butz: Fourier Transformation for Pedestrians. Springer Berlin Heidelberg New York, http://www.springer.com/de/book/9783319169842, le 2015. ISBN 3-540-23165-X.