El objeto de análisis Filtro de órdenes calcula un análisis de órdenes para vibraciones dependientes de la velocidad de rotación mediante el filtrado paso banda de órdenes individuales. Las vibraciones medidas en máquinas rotativas muestran un espectro en el que los máximos se producen a frecuencias que corresponden a un múltiplo de la velocidad de rotación de la máquina. La aparición de estos máximos se debe a dos motivos diferentes. Por un lado, la máquina se puede considerar un sistema de transmisión no lineal, que se impulsa mediante una vibración armónica correspondiente a la velocidad de rotación. La no linealidad genera armónicos de esta vibración fundamental, que dan lugar a los máximos correspondientes. Por otra parte, una máquina de este tipo puede contener componentes cuya velocidad de rotación no sea igual a la velocidad de rotación base, sino que corresponda siempre a un múltiplo fijo de esta velocidad. Por ejemplo, los distintos ejes de una caja de engranajes tienen velocidades de rotación diferentes. Sin embargo, los dientes de un engranaje o las bolas de un rodamiento generan vibraciones que guardan una relación fija con la velocidad de rotación. Si se conoce esta relación, denominada orden, entre la frecuencia fundamental de un componente y la frecuencia fundamental de la máquina, se pueden asignar específicamente los máximos determinados del espectro a uno o varios componentes de la máquina. Esto puede servir, por ejemplo, para aislar la causa de las resonancias.
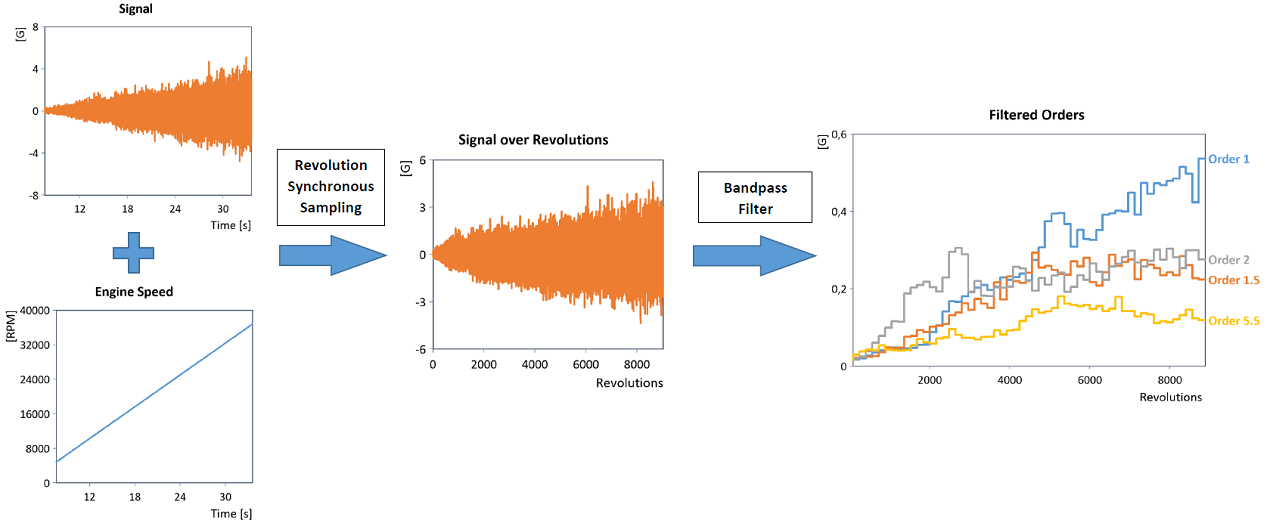
En el procedimiento empleado aquí, primero se realzia una conversión de la frecuencia de muestreo de la señal de tiempo (remuestreo síncrono con la revolución), de modo que la señal ya no está representada en intervalos de tiempo equidistantes, sino en intervalos de ángulo de rotación equidistantes (es decir, intervalos de revolución equidistantes). Esto permite realizar un análisis de órdenes de forma eficaz, ya que un filtrado paso banda convencional de la señal convertida al dominio de rotación (por ejemplo, utilizando un filtro paso banda IIR adecuado en torno al orden correspondiente) proporciona directamente la evolución individual de cada orden (para más detalles, véase RevolutionSyncSampling):
El objeto de análisis Filtro de órdenes permite calcular y devolver las órdenes filtradas en el dominio de tiempo original (a diferencia del objeto de análisis Análisis de órdenes síncronas de revolución). Por lo tanto, el objeto de análisis también puede utilizarse para realizar análisis acústicos de las órdenes filtradas.
Para el análisis de órdenes se utilizan dos métodos de medición principales. Durante una rampa de arranque, la vibración y la velocidad de rotación instantánea se miden de forma sincronizada, mientras la máquina aumenta lentamente desde su velocidad mínima hasta su velocidad máxima (análisis de rampa de arranque). En un segundo procedimiento, primero se lleva la máquina a una velocidad de rotación determinada y luego se mide la vibración para esta velocidad(análisis de órdenes con velocidad de rotación constante). El objeto de análisis Filtro de órdenes admite ambas variantes. Asimismo, el análisis de órdenes mediante el filtrado de órdenes con remuestreo sincronizado con la revolución es sumamente flexible y puede aplicarse incluso para conjuntos de datos de velocidad de rotación ruidosos o no monótonos (análisis de órdenes con velocidad de rotación variable).
Pestaña Datos
Esta pestaña especifica los datos de entrada y los parámetros para la transformación del dominio del tiempo al dominio de rotación (para más detalles, véase también RevolutionSyncSampling).
Señales en el dominio del tiempo
La señal de tiempo que se va a analizar para el objeto de análisis debe estar disponible en la estructura de datos señal. La velocidad de rotación puede especificarse en la estructura de datos señal (coincide con un análisis de rampa de arranque o con un análisis de órdenes con velocidad de rotación variable) o como valor escalar (coincide con un análisis de órdenes con velocidad de rotación constante o con una frecuencia fundamental fija).
Si faltan unidades o la “gestión de unidades” está desactivada, la velocidad de rotación siempre se interpreta en la unidad [1/min] y el componente X de la señal de tiempo en la unidad [s].
La velocidad de rotación instantánea suele medirse con un generador de impulsos que registra un determinado número de impulsos por revolución. Puede convertir la señal de impulsos resultante directamente en una señal de velocidad de rotación. Para ello, seleccione la opción La velocidad de rotación es una señal de impulso e introduzca el Número de impulsos por revolución. La señal de impulso se convierte en una señal de velocidad de rotación mediante la función ImpulseToFrequency.
Remuestreo en el dominio de rotación
Para el remuestreo del dominio del tiempo al dominio de rotación, se dispone de tres modos diferentes. En la mayoría de las aplicaciones prácticas, el remuestreo lineal es suficiente:
Métodos de remuestreo |
Descripción |
|---|---|
Interpolación lineal |
La señal de tiempo se analiza mediante interpolación lineal en los puntos de tiempo (no equidistantes) correspondientes a los puntos de referecia de revolución equidistantes, antes de transferirla al dominio de rotación. La transformación es, por tanto, rápida, pero puede causar efectos Aliasing en el posterior análisis FFT de la señal muestreada sincronizada con la revolución. |
Interpolación de Spline |
La señal de tiempo se analiza mediante interpolación de Spline en los puntos de tiempo (no equidistantes) correspondientes a los puntos de referencia de revolución equidistantes antes de transferirla al dominio de rotación. En comparación con el remuestreo lineal, la interpolación de spline es ligeramente más lenta, pero se reducen los efectos Aliasing. |
Remuestreo FFT |
La señal de tiempo se analiza mediante remuestreo FFT en los puntos de tiempo (no equidistantes) correspondientes a los puntos de referencia de revolución equidistantes antes de transferirla al dominio de rotación. La señal de tiempo se transforma primero al dominio de la frecuencia, donde se añaden ceros, y luego se transforma de nuevo al dominio del tiempo. El remuestreo mediante la transformada de Fourier conduce a un resultado casi ideal, ya que no se añaden componentes de señal de alta frecuencia. Esto elimina prácticamente los efectos Aliasing al calcular el espectro de órdenes, pero el tiempo de cálculo aumenta considerablemente. |
Si se selecciona el método de remuestreo de FFT o de Splines se debe especificar un Factor de remuestreo mediante el cual se incrementa la frecuencia de muestreo de la señal durante el algoritmo de transformación.
Independientemente del método de remuestreo seleccionado, se debe especificar el número de Puntos de datos por revolución para que la señal se transforme al dominio de rotación. Determina el muestreo de la señal transformada al dominio de rotación. La mitad de este valor determina el orden máximo que se puede calcular, según el teorema de muestreo de Nyquist.
Existen dos modos para determinar el número de puntos de datos por revolución:
Puntos de datos por revolución |
Descripción |
|---|---|
Automático (ajuste a orden máxima) |
Calcula un valor automático para el número de puntos de datos por revolución, de forma que el orden teóricamente mayor que se produce en la señal pueda seguir calculándose mediante el análisis de Fourier. El valor calculado automáticamente puede limitarse mediante un valor Límite libremente ajustable. |
Valor fijo |
Se puede introducir cualquier valor fijo para el número de puntos de datos por revolución. |
Pestaña Opciones
Esta pestaña se utiliza para especificar el filtro de órdenes para el filtrado paso banda de órdenes individuales o múltiples. Aquí se realiza un filtrado paso banda IIR convencional en torno al orden correspondiente de la señal transformada al dominio de rotación (para más detalles, véase también RevolutionSyncSampling).
Salida
Están disponibles los siguientes cuatro modos de salida del objeto de análisis Filtro de órdenes:
Modo |
Descripción |
|---|---|
Órdenes filtradas (como lista) |
Calcula las órdenes filtradas. Estas se devuelven en forma de lista. |
Curvas RMS de órdenes filtradas (como lista) |
Calcula las curvas RMS de órdenes filtradas. Estas se devuelven en forma de lista. |
Órdenes filtradas (como series de señales) |
Calcula las órdenes filtradas. Se devuelven como una serie de señales. |
Curvas RMS de órdenes filtradas (como series de señales) |
Calcula las curvas RMS de órdenes filtradas. Se devuelven como una serie de señales. |
Suma de las órdenes filtradas |
Calcula la suma de las órdenes filtradas. El resultado devuelto es una señal. |
Curva RMS de la suma de las órdenes filtradas |
Calcula la curva RMS de la suma de las órdenes filtradas. |
Análisis de órdenes RMS promediado (RMS de cada orden) |
Calcula el nivel RMS total de cada orden. Este modo es adecuado para el análisis de órdenes a velocidades de rotación constantes. El resultado devuelto es una señal (X = orden, Y = valor RMS). |
Filtro paso banda
Para calcular la evolución de las órdenes, se realiza un filtrado paso banda IIR convencional en torno al orden correspondiente de la señal transformada al dominio de rotación. Están disponibles los siguientes filtros paso banda:
Filtros |
Descripción |
|---|---|
Butterworth |
Se utiliza un filtro Butterworth IIR como filtro paso banda de orden. También se puede especificar el orden del filtro del filtro Butterworth. Para más detalles funciónIIRFilter. |
Pico |
Como filtro paso banda de orden se utiliza un filtro IIR pico especial. Este siempre tiene orden del filtro 2. Para más detalles, véase la función IIRPeakFilter. |
Órdenes a filtrar
Las órdenes que se deben filtrar se pueden establecer explícitamente en una tabla o tomarse de un conjunto de datos. Las órdenes seleccionadas forman la frecuencia central de banda del filtro paso banda configurado. Los anchos de banda de orden se pueden especificar simétricamente alrededor del orden como anchos de banda de filtro de 3 dB. El ancho de banda de filtro de 3 dB define el rango de órdenes fuera del cual se excluyen las órdenes (determinado por el punto de –3 dB, es decir, el punto en el que se alcanza el 70,7 % de la amplitud original de la señal).
Cálculo de RMS
Para calcular las curvas RMS de las órdenes filtradas (como lista o serie de señales) o para calcular la RMS de la suma de las órdenes filtradas, se puede elegir entre los dos siguientes modos RMS:
Modo de cálculo RMS |
Descripción |
|---|---|
Bloque por bloque |
Cálculo de RMS bloque por bloque (en el dominio de rotación). El tamaño de bloque (ancho de intervalo) se puede especificar en múltiplos de una revolución. |
Móvil |
Cálculo de RMS móvil (en el dominio de rotación). El tamaño de bloque (ancho de intervalo) se puede especificar en múltiplos de una revolución. |
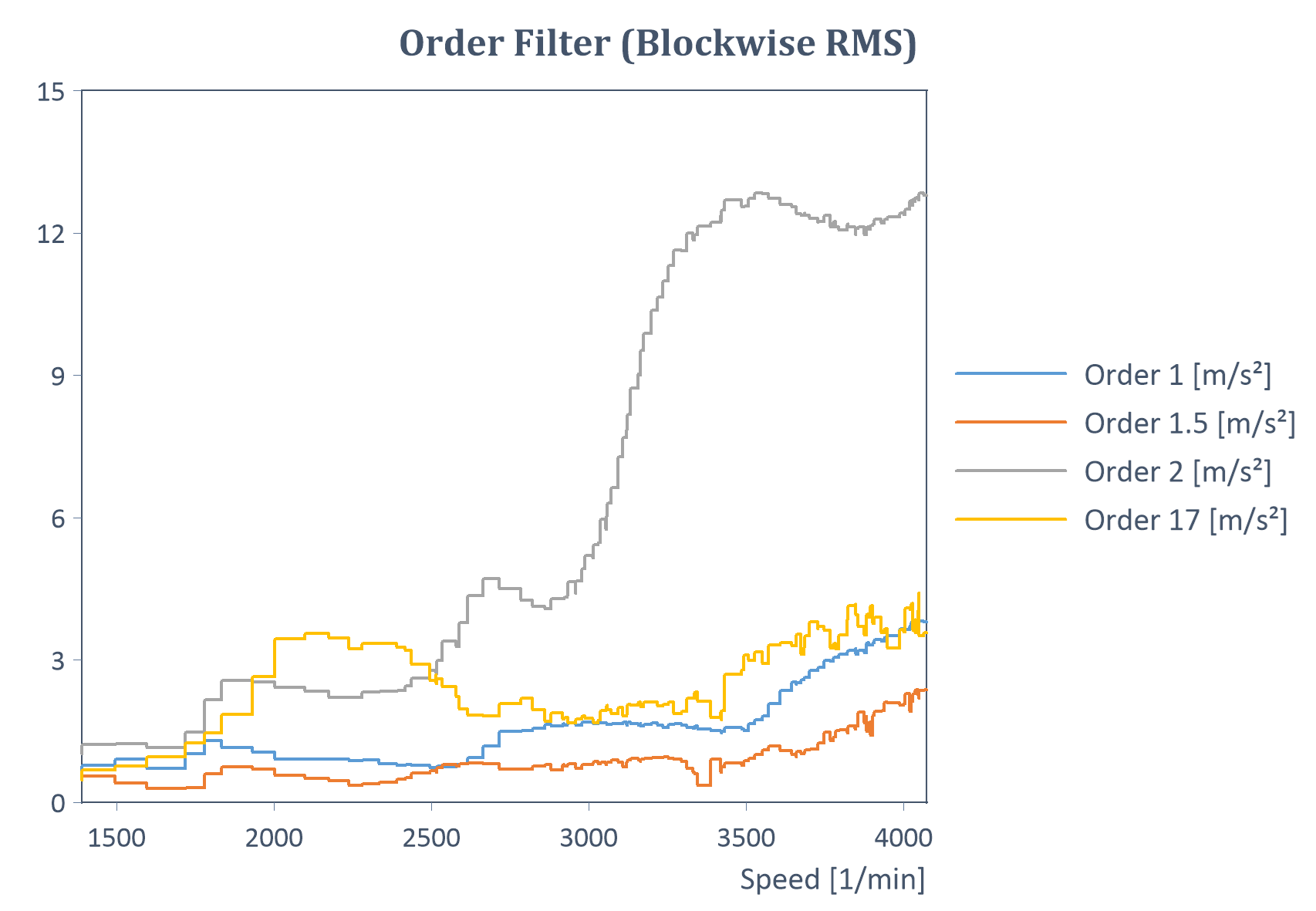
Ejemplo de filtro de órdenes con cálculo de RMS bloque por bloque para una rampa de arranque(con Y = amplitud, X = velocidad):
Resultado
Los siguientes tipos de resultados están disponibles para todos los modos de salida (a excepción del análisis de órdenes RMS promediado):
Resultado |
Descripción |
|---|---|
Y = amplitud, X = revolución |
Las curvas de amplitud de las órdenes se devuelven sobre las revoluciones. |
Y = amplitud, X = tiempo |
Se devuelven las curvas de amplitud de las órdenes a lo largo del tiempo. Tanto en la salida de las órdenes filtradas como en el cálculo RMS movil de la evolución de las órdenes, es posible volver a transformar a la base de tiempo original. Esto permite utilizar el objeto de análisis para realizar análisis acústicos de las órdenes filtradas. |
Y = amplitud, X = velocidad de rotación |
Las curvas de amplitud de las órdenes se devuelven en función de la velocidad de rotación. Se puede ordenar de forma monótona ascendente según la velocidad de rotación. |
El resultado Y = amplitud, X = velocidad de rotación contiene puntos de apoyo de velocidad no equidistantes (estos coinciden exactamente con los puntos de apoyo de rotación equidistantes después del filtrado en el dominio de rotación). Por lo tanto, el resultado también se puede analizar en un rango de velocidad de rotación equidistante definiendo la velocidad de rotación inicial, la velocidad de rotación final y la incremento de velocidad de rotación. Esto implica una interpolación lineal sobre el rango de velocidad de rotación equidistante especificado. Para que el remuestreo lineal produzca resultados significativos, la resolución de velocidad de rotación calculada por el algoritmo debe ser suficientemente alta (por ejemplo, en el cálculo RMS móvil o en el cálculo RMS bloque por bloque con un tamaño de bloque suficientemente pequeño).
Nota El cálculo de las curvas RMS (bloque por bloque) de las órdenes que se van a filtrar proporciona curvas similares a las del objeto de análisis Análisis de órdenes síncronas de revolución. Para ello, en el último objeto de análisis mencionado se debe ajustar el modo de salida cortes de órdenes incluyendo la extracción del nivel RMS en la banda de orden. El análisis de orden RMS promediado de ambos objetos de análisis también proporciona los mismos resultados.
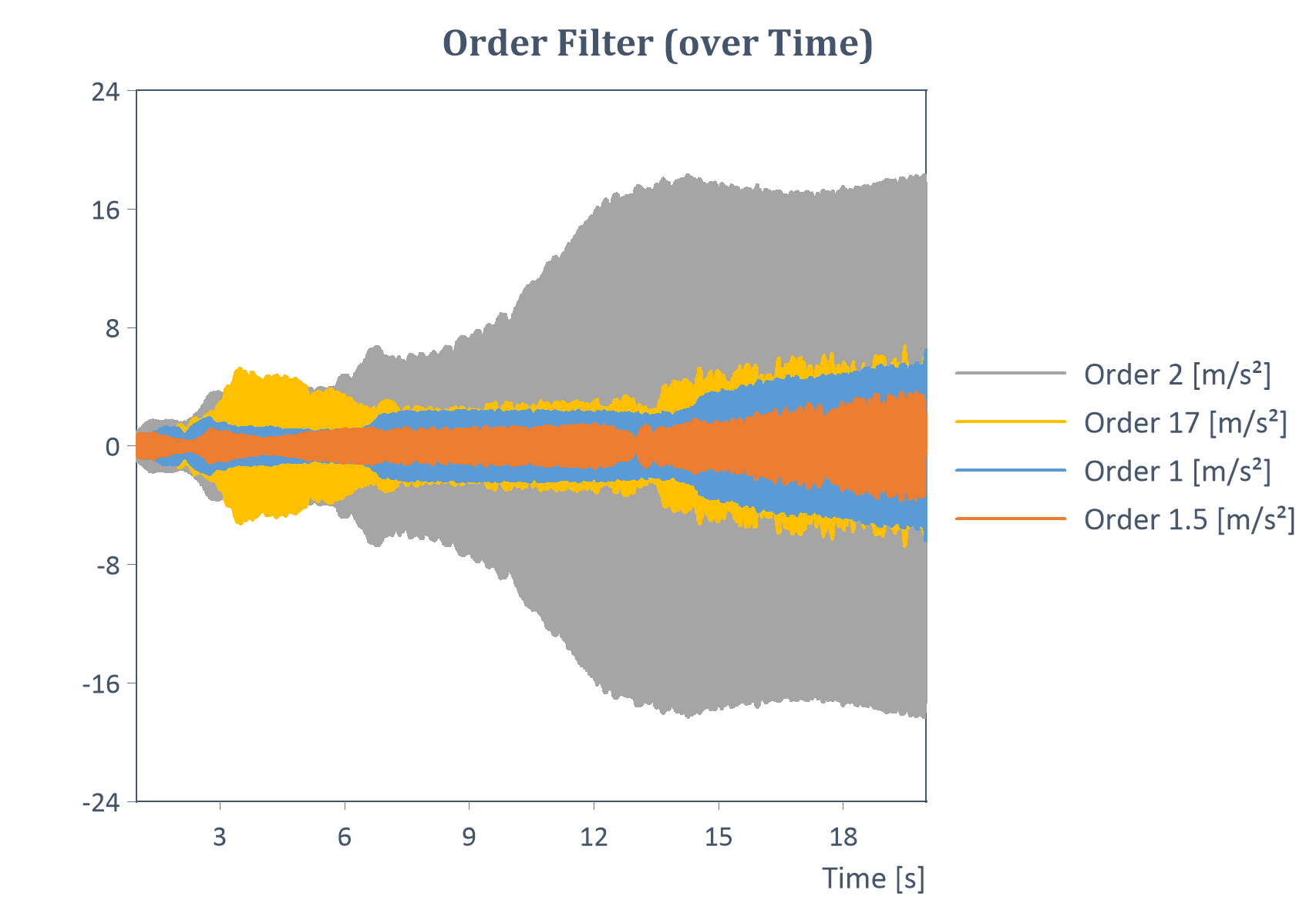
Ejemplo de un filtro de órdenes en el tiempo para una rampa de arranque (Y = amplitud, X = tiempo):
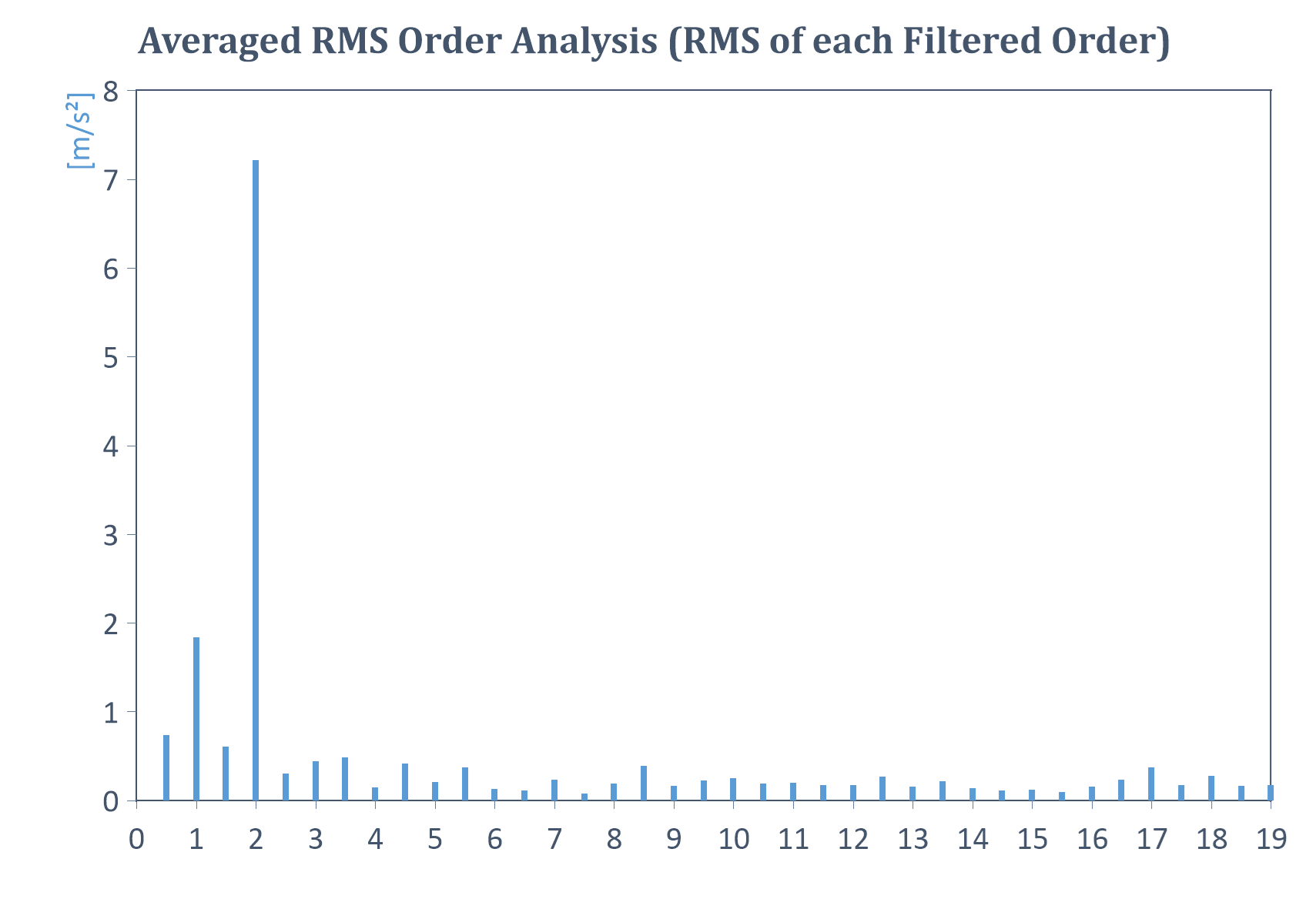
Ejemplo de análisis de órdenes RMS promediado para una señal con velocidad de rotación constante (RMS de cada orden filtrado):
Ejemplos:
En la base de datos del proyecto C:\Users\Public\Documents\Weisang\FlexPro\2025\Examples\Order Tracking Analysis.fpd o C:>Usuarios>Acceso público>Documentos públicos>Weisang>FlexPro>2025En \Examples\Order Tracking Analysis.fpd encuentra ejemplos de los distintos casos de uso y modos en los que se puede realizar un análisis de órdenes. Se incluyen, en particular, los diagramas anteriores.
Función FPScript utilizada
Véase también
Objeto de análisis Análisis de órdenes síncronas de revolución